Deep-Sea Robot
Preliminary design of an underwater vehicle for exploration and light intervention
Systems design
Mechanical analysis
Environmental engineering
Preliminary design of an underwater vehicle for exploration and light intervention
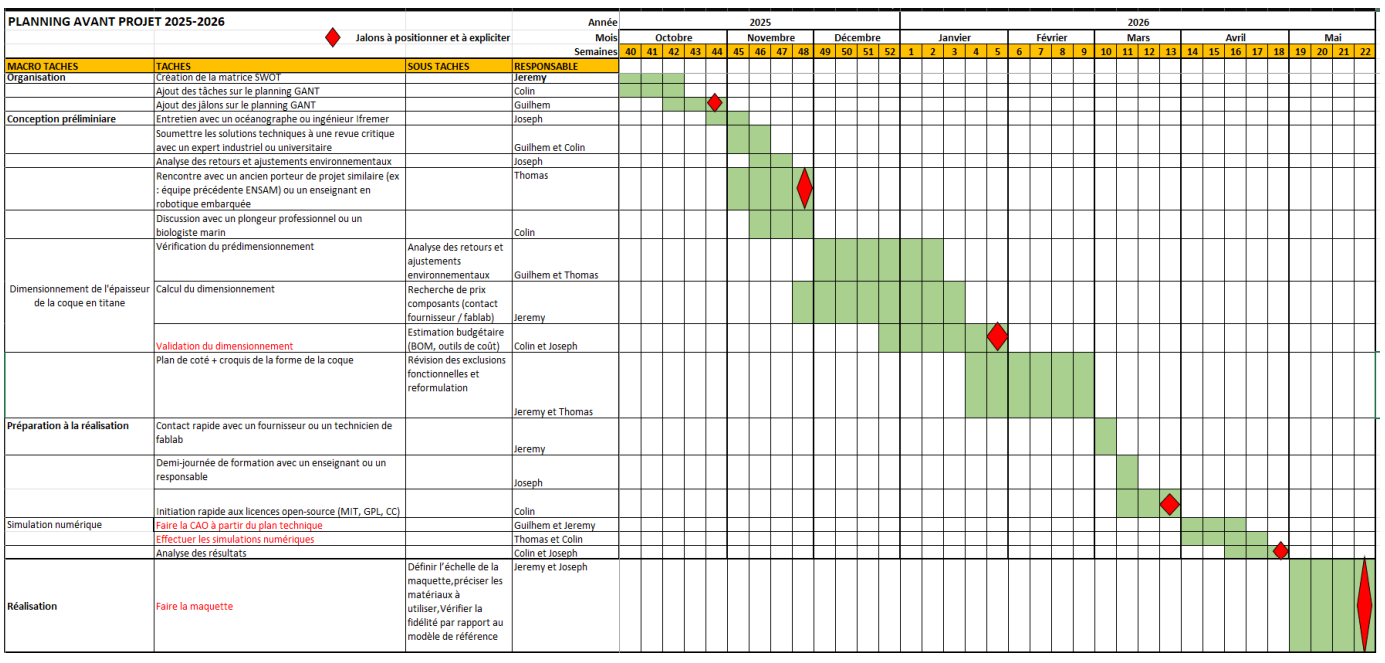
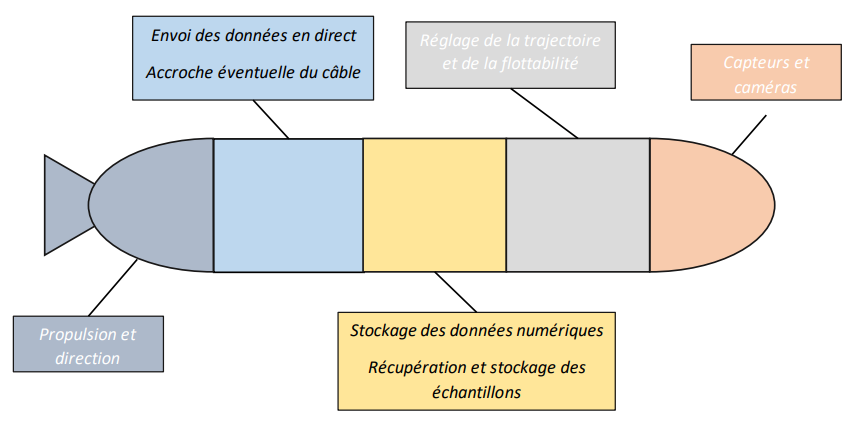
Conducted within the M214 design team at Arts et Métiers (ENSAM), this preliminary engineering project aimed to design a submersible robot capable of exploring deep-sea environments and performing light intervention tasks such as sampling and mapping. The study focused on defining the functional architecture, identifying environmental and regulatory constraints, and pre-dimensioning the main structural components.
The project involved competitive analysis (Forssea, Ifremer Ulyx, OpenROV), a detailed functional specification study, and the establishment of a feasible technical architecture integrating propulsion, guidance, and communication systems under 200 m depth conditions.
This work provided comprehensive exposure to systems engineering, conceptual design, and environmental compliance in harsh marine contexts. It laid the foundation for future simulation, prototyping, and experimental validation phases.